Research Projects
纵向项目
- 湖北省创新群体项目,困难环境无人自主测绘,2026.01-2029.12,主持。
- 国家自然科学基金面上项目,城市空间智能渐进演化理论与方法,2026.01-2029.12,主持。
- 国家重点研发计划青年科学家项目,融合多源对地观测数据的城市植被碳储量时空建模关键技术与核心软件,2024.01-2026.12,主持。
- 国家自然科学基金面上项目,面向数字孪生道路的场景理解与三维基底构建,2022.01-2025.12,主持。
- 国家自然科学基金青年项目,基于车载点云和影像的高清地图道路要素结构化提取,2020.01-2022.12,主持。
- 中国博士后创新人才支持计划,面向高精驾驶地图道路要素提取的多平台点云协同处理理论方法,2019.01-2020.12,主持。
横向项目
- 华为-武大空间信息技术创新实验室合作项目,面向城市级智驾场景的CG模型真实感纹理生成研究,2025.04-2026.04,主持。
- 华为黎曼实验室开放基金项目,大模型知识引导的场景级多模态空间数据统一表征构建,2024.01-2025.01,主持。
- 南方电网电力科技股份有限公司合作项目,高精度高可靠点云配准算法开发,2023.03-2023.12,主持。
- 滴滴盖亚青年学者基金项目,基于transformer的图像匹配与相机位姿估计,2022.01-2022.12,主持。
Research Directions
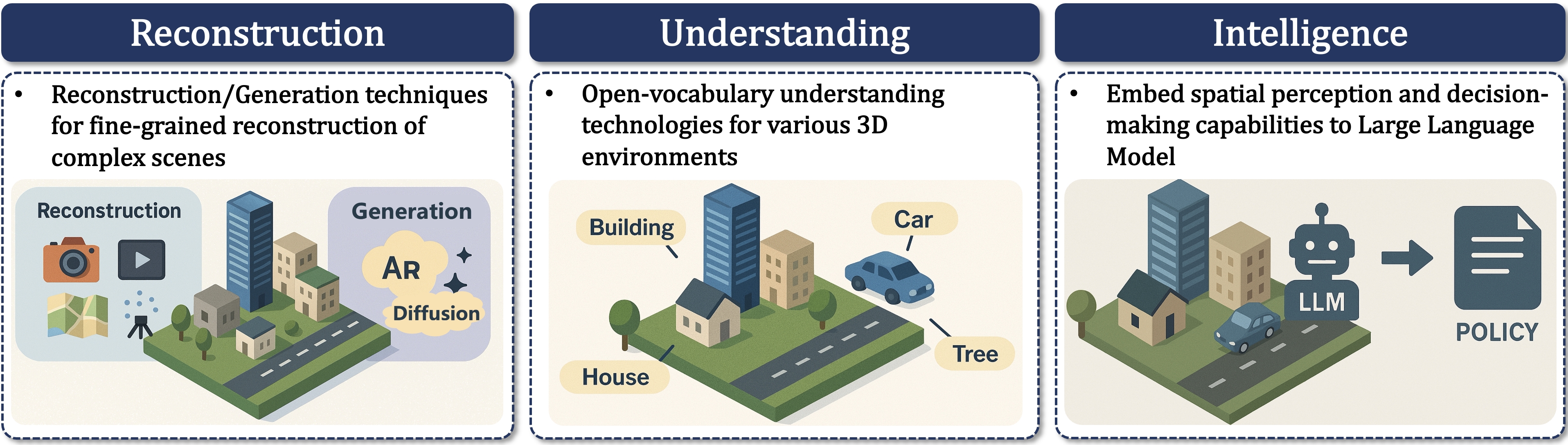
Technologies for Urban Spatial Intelligence: Reconstruction, Understanding, and Interaction (城市空间智能理论方法)
We focus on cutting-edge technologies of 3D reconstruction/generation, 3D open-vocabulary understanding, and 3D Large Language Models, aiming to enable an integrated and end-to-end chain of intelligent governance for complex urban scenarios.
聚焦3D重建/生成技术,3D开放词汇理解技术,及3D-LLM等前沿交互技术,贯通复杂城市场景的智能治理链条。
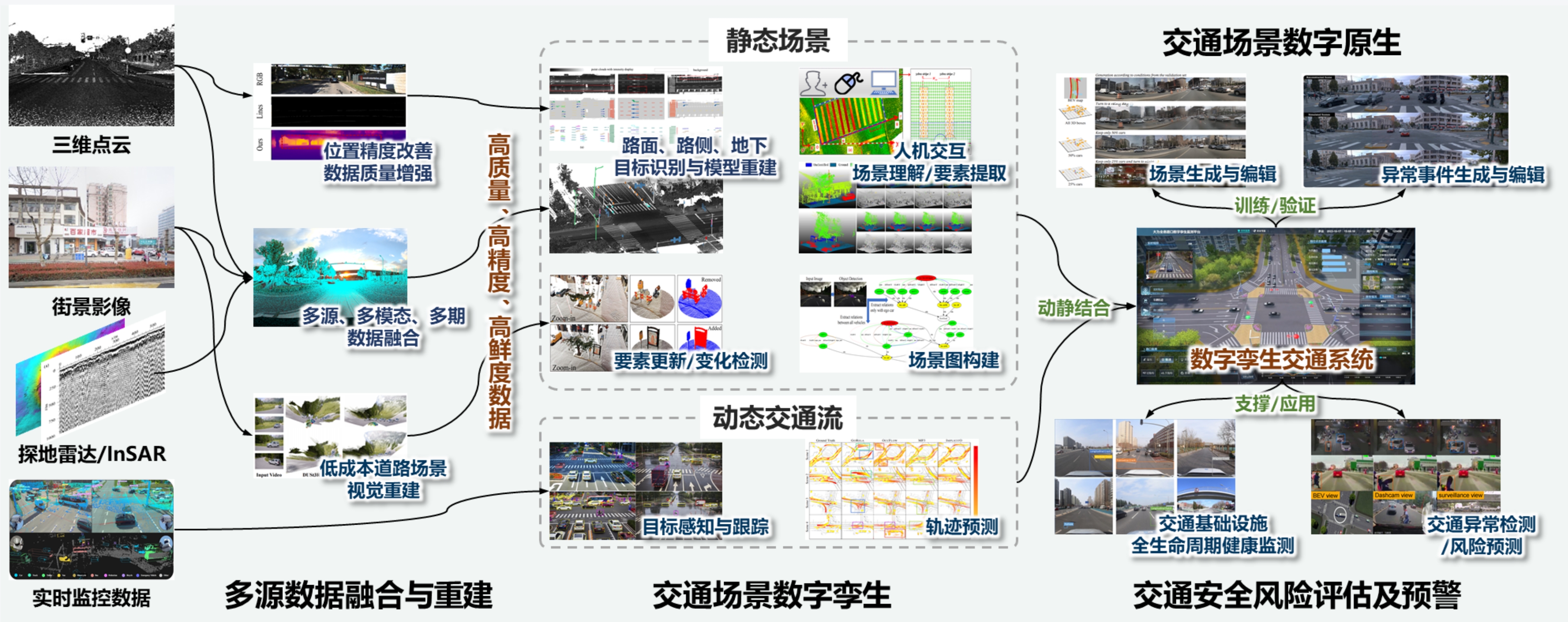
Entire Road Domain Digital Twin and Traffic Safety (全路域数字孪生与交通安全)
Through the research of multi-source data fusion and reconstruction of traffic scenes, digital twin and digital native, as well as traffic safety risk assessment and early warning and other key technologies,
we hope to build a safer, low-carbon, efficient and intelligent digital twin intelligent transportation system.
通过研究交通场景多源数据融合与重建、数字孪生与数字原生以及交通安全风险评估及预警等关键技术,构建更安全、低碳、高效、智能的数字孪生智能交通系统。
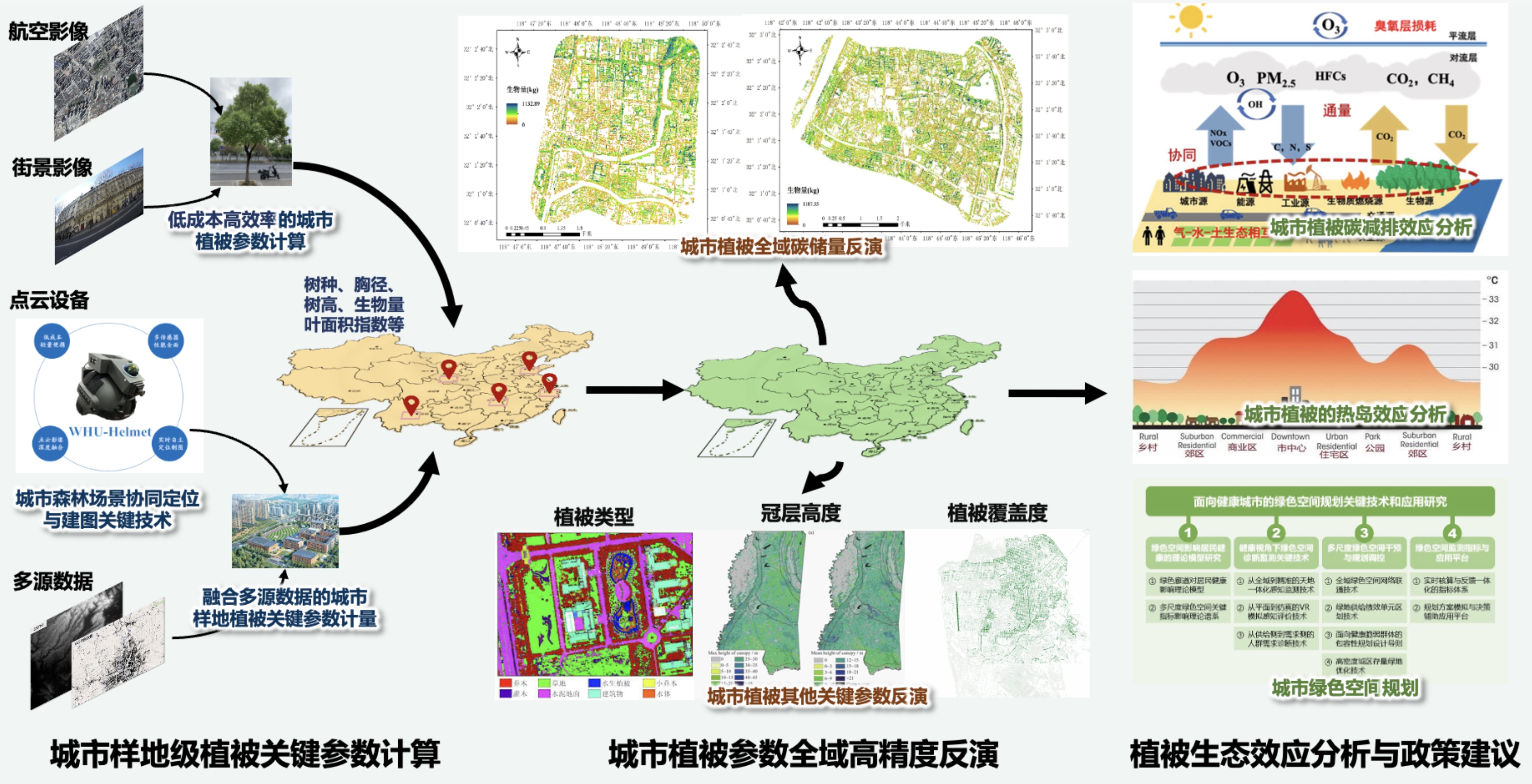
Calculation of key parameters of urban vegetation and evaluation of ecological benefits (城市植被关键参数计算与生态效益评估)
Utilizing multi-source earth observation methods, constructing observation systems of vegetation parameters at different scales and with different granularities, supporting the assessment of various ecological benefits of urban vegetation, providing scientific basis for the intelligent management and control of urban green space system,
and assisting the national strategy of sustainable development of cities.
利用多源对地观测手段,构建不同尺度不同细粒度的植被参数观测体系,支撑城市植被各类生态效益评估,为城市绿地系统智慧化管控提供科学依据,助力国家城市可持续发展战略。
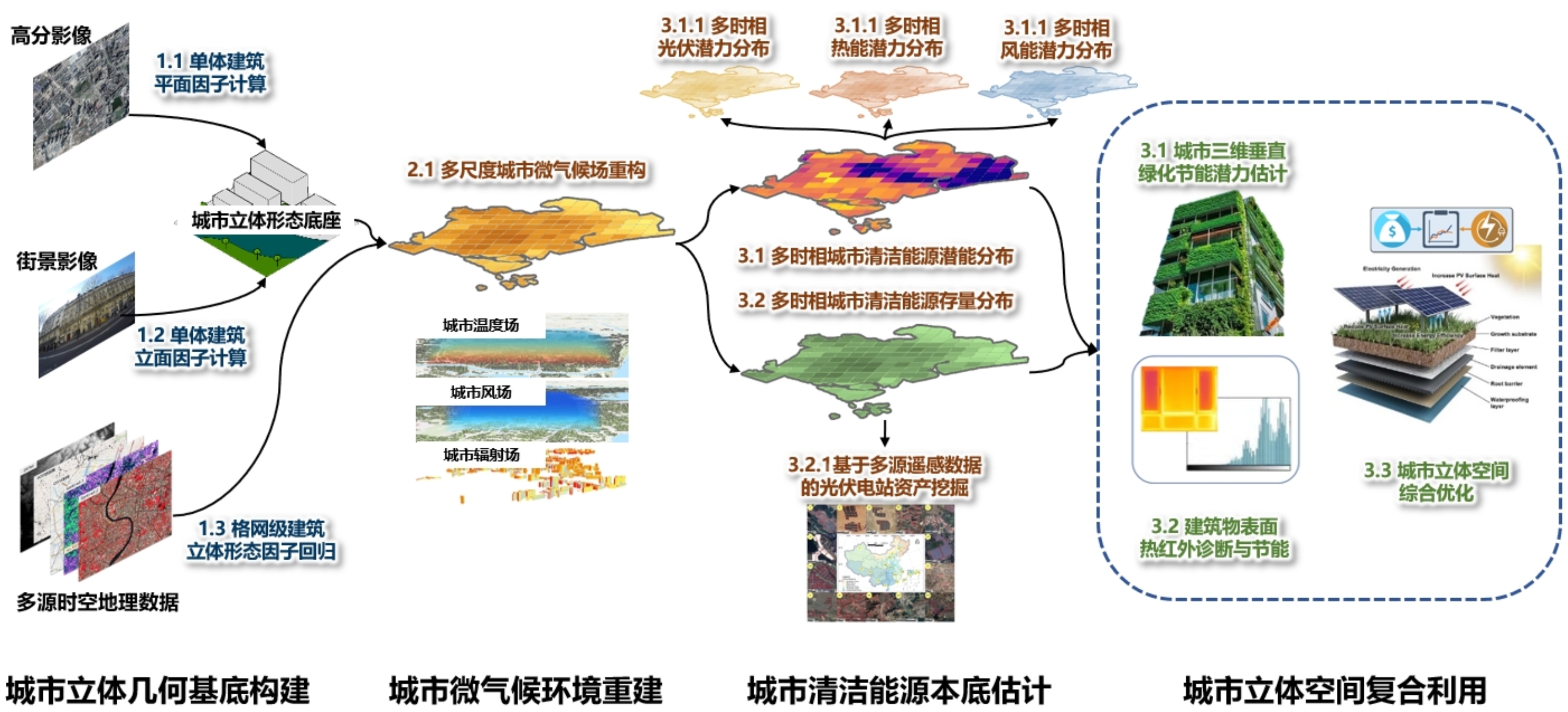
3D Urban Morphology Extraction and Composite Utilization (城市立体空间复合利用)
Based on multi-source earth observation data, reconstruct the multi-scale urban 3D morphology and microclimate environment, establish the baseline for urban clean energy,
and develop a scientific computing and analysis system for integrated urban 3D spatial governance oriented toward sustainable development.
基于多源对地观测数据,重构多尺度城市立体形态基底与微气候环境,在此基础摸清城市清洁能源本底,发展面向可持续发展的城市立体空间综合治理的科学计算与分析体系。
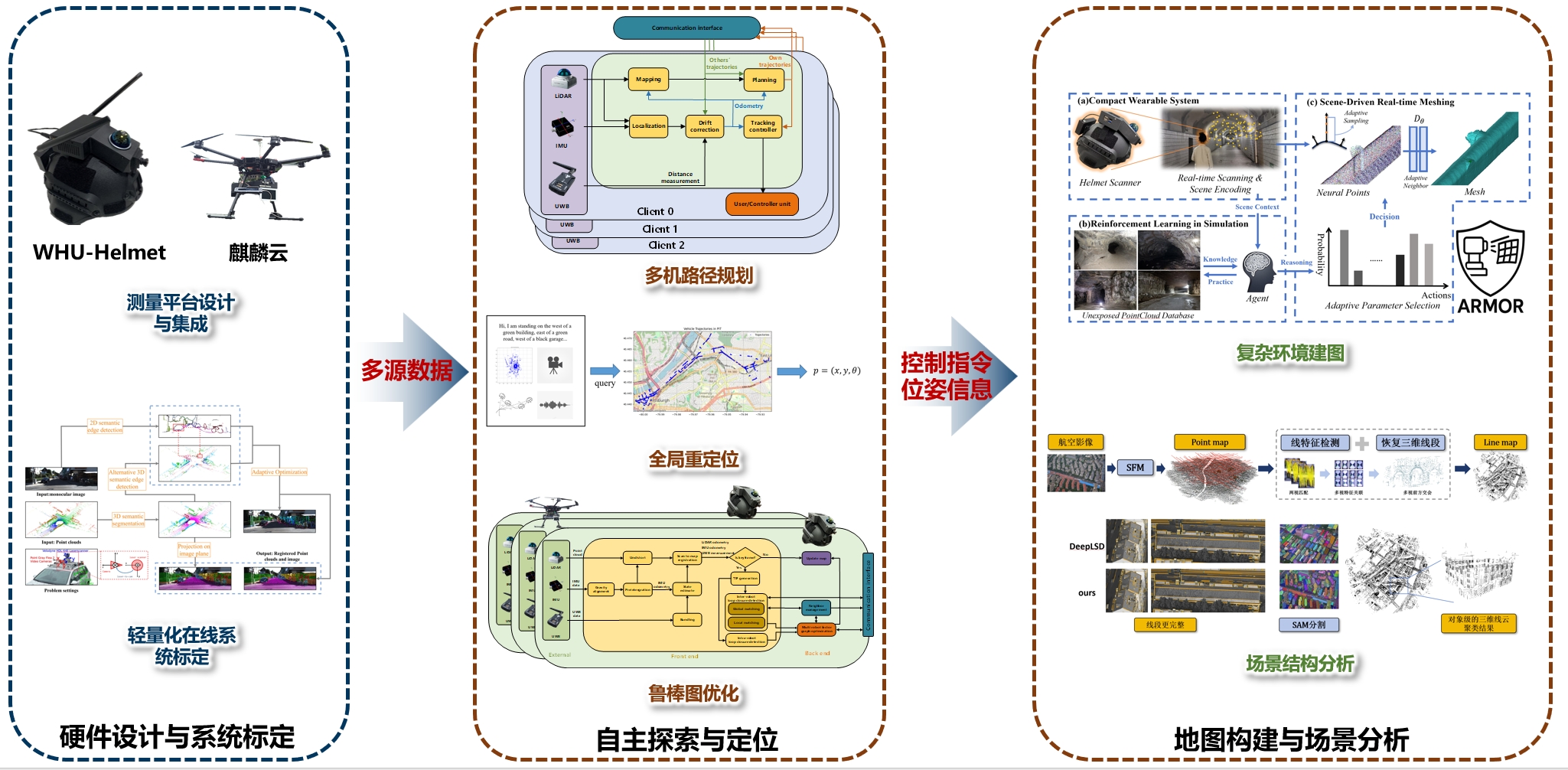
Intelligent Exploration and Mapping by Autonomous Swarms in Complex Environments (复杂空间无人集群智能探索与建图)
We focuses on collaborative perception and intelligent mapping of multi-robot systems in complex environments. It centers on key technologies including heterogeneous mapping platform integration, multi-source information fusion, multi-agent cooperative path planning, robust pose estimation, and semantic environment analysis,
aiming to develop intelligent swarm systems capable of autonomous exploration, real-time mapping, and environment understanding.
聚焦于复杂环境中多无人系统的协同感知与智能建图,围绕异构测绘平台集成、多源信息融合、多机协同路径规划、鲁棒位姿估计与语义环境解析等关键技术,致力于构建具备自主探索、实时建图与环境理解能力的智能集群系统。